
自動運転技術の最前線情報をお届けする本連載、第19回となる今回は「トロッコ問題」について。たとえば自動運転技術が搭載されているクルマの前方に幼稚園児の列が歩いていて、咄嗟にハンドルを切ればクルマは谷底に落ちてドライバーは間違いなく死ぬが幼稚園児は全員助かる…といった場面が訪れたとき、クルマに搭載された機能はどう判断するのか。
自動運転技術の実用化が近づく現代になって、こうした倫理学上の問題が浮上してきたわけだが、では2021年の現時点で、この問題はエンジニアたちのあいだでどう語られているのか。最前線の議論を紹介します。
文/西村直人
写真/Adobe Stock(アイキャッチ写真は@bluedesign)、illustAC
シリーズ【自律自動運転の未来】で自動運転技術の「いま」を知る
■「乗員を守るため、歩行者との衝突事故はやむを得ない」
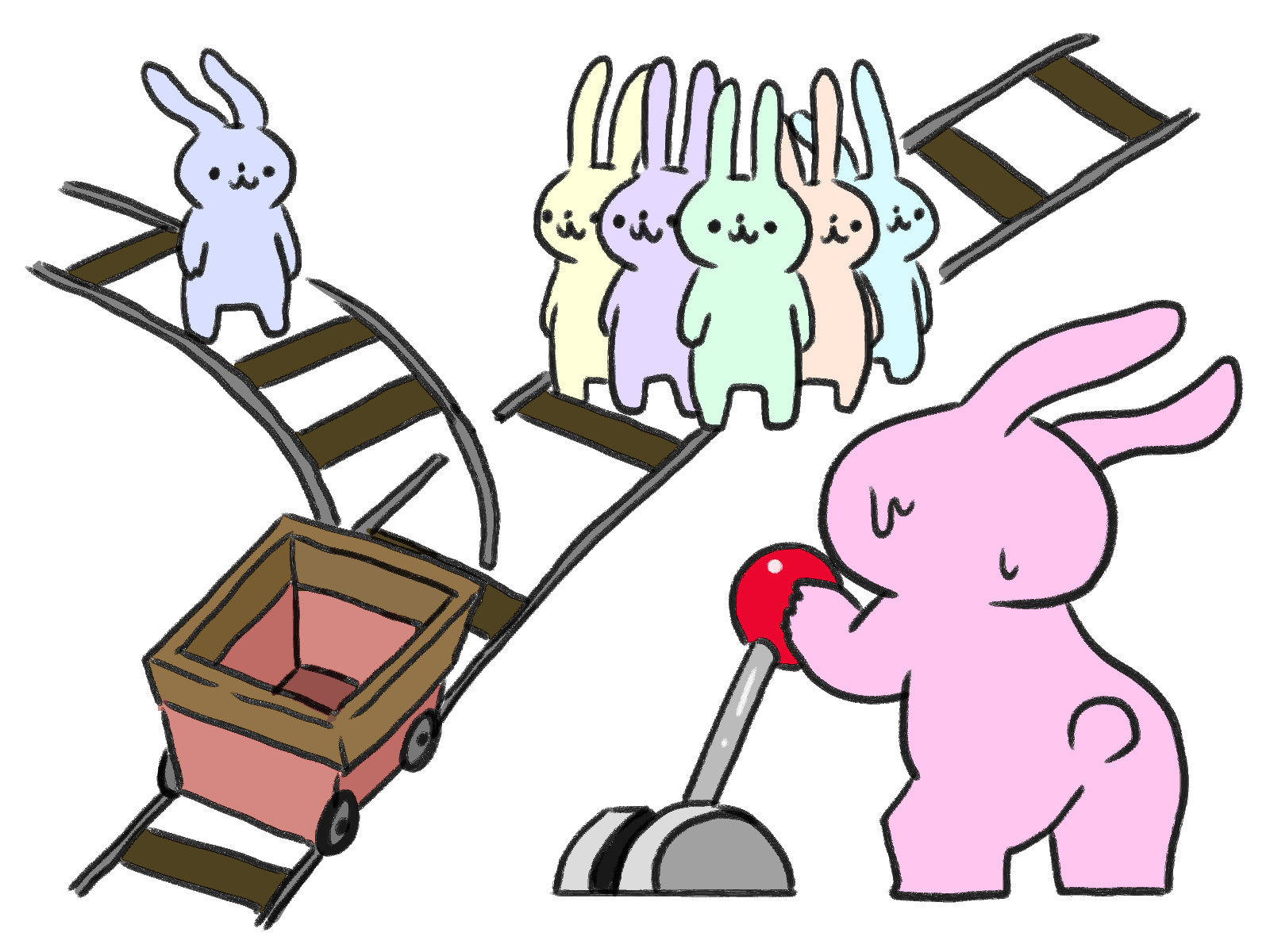
「自動運転技術を搭載した車両が狭い道路を走行中、道路の左脇に2名、右脇に1名が歩いていたとする。このとき、何らかの理由でどちらかにステアリングを切らなければいけない場合、システムはどちらに舵を切るのか……」。
これが俗に言う「トロッコ問題」と言われるテーマです。二者択一を自動運転システムが迫られた場合、どちらのリスクをシステムはとるのかというお話です。このテーマについては、各国の学識者や自動車メーカーの技術担当者から意見が寄せられています。
そのひとつ、メルセデス・ベンツの担当者は次のように語ります。
2016年10月、メルセデス・ベンツの自動運転技術と安全技術を開発している担当者は、「自動化レベル4以上の自動運転技術を搭載したメルセデス・ベンツでは、乗員を守るため、歩行者との衝突事故はやむを得ない可能性がある」という趣旨のメッセージを発し話題となりました。
これには表面的な部分だけを切り取った否定的な意見も散見されましたが、当時、筆者はとても高く評価しました。
なぜならば、人命に関わる倫理観や安全哲学は、この先の自動運転技術を決める上で重要になると考えたからです。また、近い将来の自動運転社会に対する問題提起が発言の根幹であるならば、本格的な普及を迎えるこのタイミングでの発言には大いなる意義がありました。
確かに、衝突事故は歩行者にとって致命傷となる可能性が高く、一方で乗員を守る責務がシステムには課せられています。よって、担当者の「やむを得ない」という発言は乗員保護の観点から見れば正論であり、歩行者側からすればあり得ない発言です。
しかし、実際の交通環境では急に飛び出す歩行者、ルールに従わない車両などが後を絶たないため、残念ながら事故はゼロになりません。その意味で、究極の二者択一的な議論は前もって行っておくことが重要です。
先の担当者は「乗員を守る」と発した後、こう続けています。
「あらゆる手段(車両制御)を講じて衝突回避に向かいながら、それでも衝突が避けられない場合は、最後の一瞬まで被害を軽減するまで速度を落とし続け、さらに万が一衝突してしまった場合でも、歩行者の被害が軽減するような車体設計をとることで人命を守っていく。そうした自動運転技術と安全な車体設計の組み合わせを目指すことが我々の使命だ」と。
これこそ、人命第一の倫理観をもって技術開発に取り組む自動車メーカーの真摯な姿です。

















コメント
コメントの使い方