いまから2~3年後には、高速道路におけるトラック自動運転技術(SAEレベル4)が実用化するとみられている。いっぽう、街中で運行するトラックの自動運転技術も開発中だ。その一つにして非常にユニークな技術が、さきごろ実証試験を完了した三菱ふそうトラック・バスの「eキャンター・センサーコレクト」に搭載されている。
文/トラックマガジン「フルロード」編集部
写真/三菱ふそうトラック・バス、フルロード編集部
図/環境省
日本のごみ出しスタイルに合った自動運転技術

三菱ふそうは、ダイムラーグループとして大型トラックの自動運転技術を開発中だが、それと並行して様々なユースケース(用途)に対応した自動運転技術を研究している。小型BEVトラックベースの塵芥車(ごみ収集車)「eキャンター・センサーコレクト」が搭載する「自動追尾運転システム」は、その一環とした開発されたものだ。
自治体が公共サービスとして実施するごみ収集作業は、運転専任者1人+収集作業者1~2人の計2人または計3人ひと組が、1台の塵芥車に乗務して行なわれている。それに対して自動追尾運転システムは、将来の人口減少下でも公衆衛生を維持すべく、わずか1人で収集作業が行なえることを目指している。
しかし、これは決して容易なことではない。半透明ポリエチレン袋に詰められた家庭ごみが、指定ごみ集積場で無造作に積み上げられ、それが路地の狭い範囲に連なっている……という、日本の一般的なごみ出しスタイルは、1台のチームで分業しているからこそ収集が成立している。これを単独で、移動→降車→ごみ収集・積込→乗車→移動→……を頻繁に繰り返すのは、きわめて非効率かつ重労働である。
そこで三菱ふそうでは、ドライバー兼作業者が降車・徒歩で集積場間を移動する際に、塵芥車を遠隔操作し、無人状態で自動追尾させるという画期的なアイディアを研究してきた。
22年度から公道を含む実証実験も
三菱ふそうが開発した自動追尾運転システムは、自動運転システム、高精度GPS、LiDAR(レーザー走査式測距センサー)、光学画像認識システム、超音波式センサー、ドライバー兼作業者用の遠隔操作端末「リモートHMI」などで構成される。
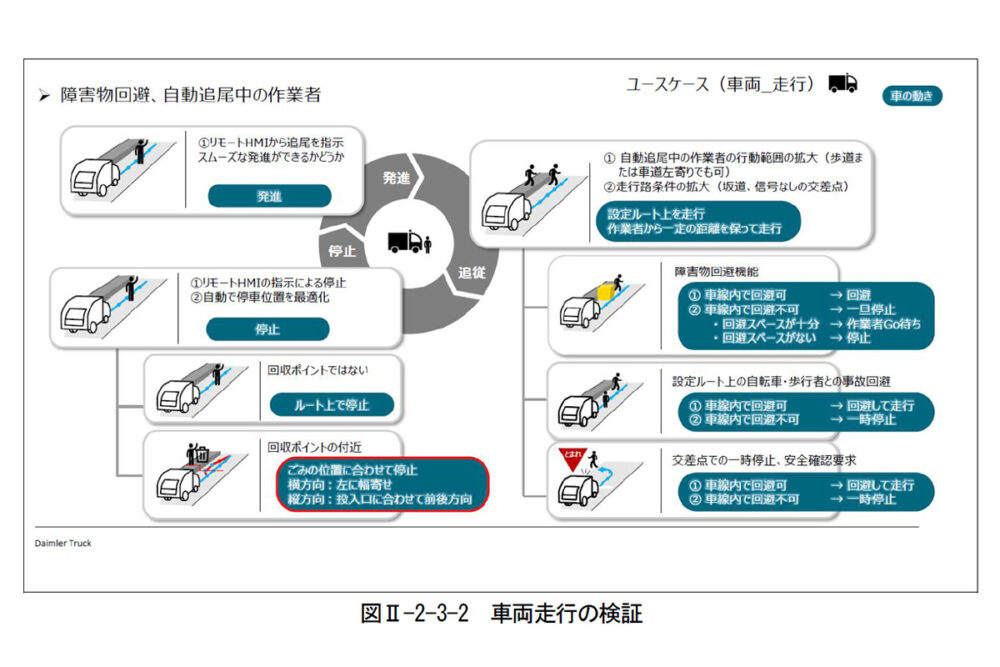
降車したドライバー兼作業者がリモートHMIで自動追尾を指令すると、LiDARの探知データあるいは光学カメラによる画像認識でドライバーの姿と位置を認識し、併せて周辺の障害物を検知・回避しつつ後ろから無人走行(最高で時速5km)で付き従い、集積場でドライバーが止まればその近傍で停車し、次の集積場へ向かって歩き出せば、再び付いていく……という非常に高度な技術だ。
このシステムは、2020年に「eキャンター・センサーコレクト」として実験用プロトタイプ車が完成、翌21年に環境省の「令和4年度デジタル技術の活用等による脱炭素型資源循環システム創生実証事業」の一つとして採択され、22~23年にかけて実証事業が行なわれた。
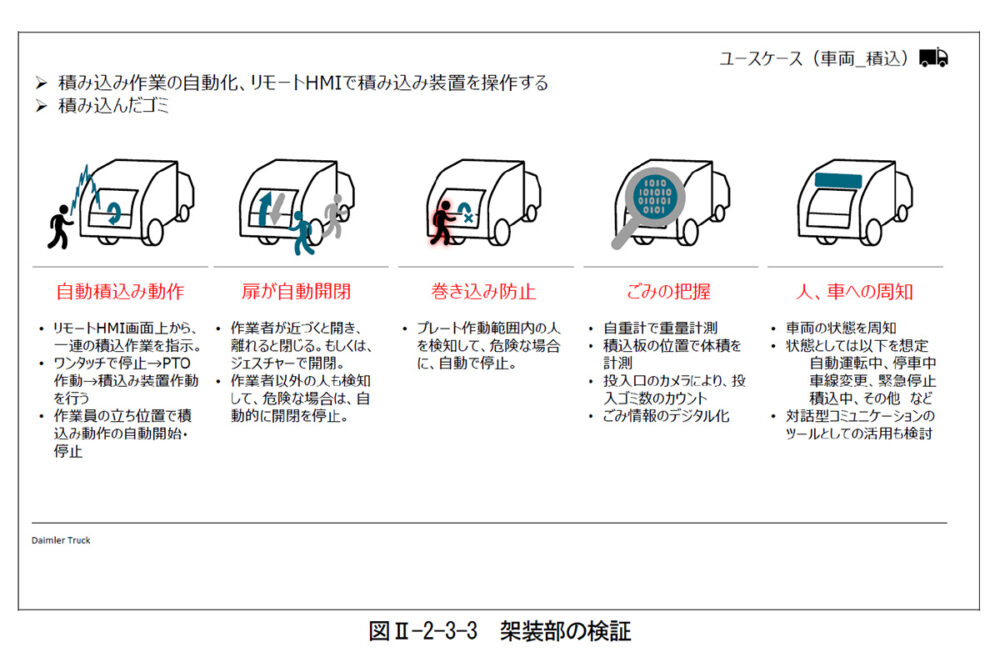
実証事業では、プロトタイプ車よりも高性能な現行型(2代目)eキャンターをベースとする、新型の実験車両が投入されており、単独収集作業をサポートする機能として「集積場自動検知機能」(センサーでごみ袋の集積位置を検知して自動停車)と「自動運転連動式パッカー機能」(車両後部に作業者が接近すると、投入口ドアが自動で開き、ごみ投入後に圧縮板が自動作動する)も新たに追加された。