■自動運転技術が「トラック業界」を救う?
先進安全技術における業界標準化はすでに日本がリードしている側面もあります。そのひとつが、自動運転技術の礎である先進安全技術の業界標準化です。
日本において2021年11月以降に販売される新型車には「衝突被害軽減ブレーキ」の義務化が施行されますが、その技術指針(例/時速何キロで走行中、停止車両や前走車、さらには歩行者と接触しない)は、日本がWP29に発案した内容です。
本連載で詳しく紹介している自動化レベル3技術は乗用車(パッセンジャーカー)が実現しました(編集部註/2021年3月にホンダが世界初の公道走行可能なレベル3技術「Honda SENSING Elite」をレジェンドに搭載して発売)。
それが、レベル4になると前述のように大型トラックやMaaS領域からスタートします。
MaaSは新たなカテゴリーなので大きな期待が寄せられるものの、現時点では実例に乏しく、限定エリアで小型バスなどを使った実証実験が中心です。
対して大型トラックは公道でたくさん見かけ、さらには物流を通じて我々の生活を下支えしてくれるため、親近感があるかと思います。その大型トラックにレベル4技術が搭載されるとなれば注目度も高まります。

この20年、大型トラックのドライバー数は下降傾向にあります。
国土交通省物流政策課によれば、直近10年で社会問題化するほどドライバーの不足が顕著です。また、運送業を営む企業の63%が「不足」、もしくは「やや不足」とドライバー不足を訴えています。
そうしたなか、物流業界におけるドライバー不足、さらには運転操作の疲労軽減からくる業務環境の改善、さらには安全な運行のさらなるサポートが自動運転技術に託されました。
■カルガモ走行でドライバー不足を解決する
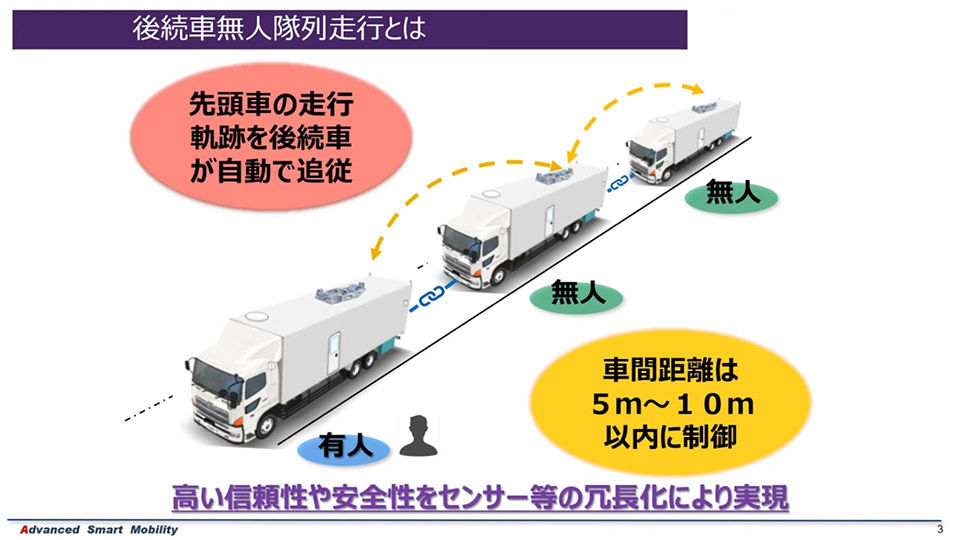
日本では2016年度からスタートした「トラックの隊列走行実証実験」と呼ばれるプロジェクトは、複数台のトラックを隊列(カルガモ)走行させドライバーの負担を軽減します。
隊列走行の実証実験では、後に続く車両の運転席にドライバーが監視役として座り、隊列を形成する先頭車両の動きに合わせて無線通信で後続車の走行制御を行う(これを電子連結といいます)A「後続車有人システム」と、後続車にはドライバーが乗らず、同じく先頭車両の動きに合わせた電子連結で後続車を引っ張るB「後続車無人システム」の2通りが行われています。
最新の実証実験結果から、隊列走行には次の課題が見つかりました。

「A」は2021年度内に高速道路における商業化が目標です。760MHz(755.5~764.5MHzの9MHz幅)のITS専用周波数帯の電波を使う「CACC」(Cooperative Adaptive Cruise Control/協調型車間距離維持支援システム)によって電子連結されます。
電子連結では、車両の加減速を「ACC(アダプティブ・クルーズ・コントロール)」機能で、横方向の制御を「LK(車線中央維持)機能でそれぞれ制御を行います。
商業化への課題として、割り込み車の対応/登坂路での増速対応/車線変更時の対応/車間距離制御の向上の4点が指摘されています。
この先は新たな技術を開発して課題4点を克服しつつ、大型トラックならではのODD構築が行われます。
一方の「B」については、冒頭の(3)で紹介したように2025 年度以降の高速道路におけるレベル4 自動運転トラックの実現が目標です。
最新の実証実験ではCACC機能を用いて、80km/hでの走行時に前後トラックの車間距離を5~9m程度、横方向の制御誤差を±50cm以下に留められることが確認できています。
また将来的には、有人と無人の技術を融合させ、幅広い道路環境でレベル4相当の自動走行を目指し、物流業界が抱えるドライバー不足や業務環境の改善、安全性能の向上を目指します。
対して、市販されている大型トラックの先進安全技術はどこまで進化しているのでしょうか。
















コメント
コメントの使い方