8月1日、レベル4自動運転トラックによる幹線輸送サービス事業の確立を目指してシステム開発を行なっているT2は、通信会社大手のKDDIと共に、自動運転トラックの緊急停止時における遠隔監視・指示の実証に成功したと発表した。
文/トラックマガジン「フルロード」編集部、写真/T2、NEXCO中日本
実証実験の概要と背景

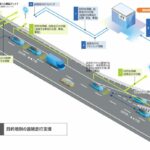
NEXCO中日本では、自動運転時代に向けて、自動運転車両と高速道路上に設置したインフラ設備の無線通信「路車間通信(V2I=Vehicle to Infrastructure)」を活用した路車協調実証実験を今年5月13日より、新東名高速の建設中区間で行なっている。
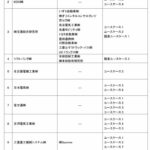
これは、車載のセンサーやインフラ設備(カメラ等)から得られる情報を管制センターで共有し、自動運転車両の安全な走行に活用する試みで、主催者のNEXCO中日本が提案している7のユースケースと、参加企業・団体から提案のあった3のユースケースを加えた10のユースケースについて計23件の実証実験を行なうというもの。
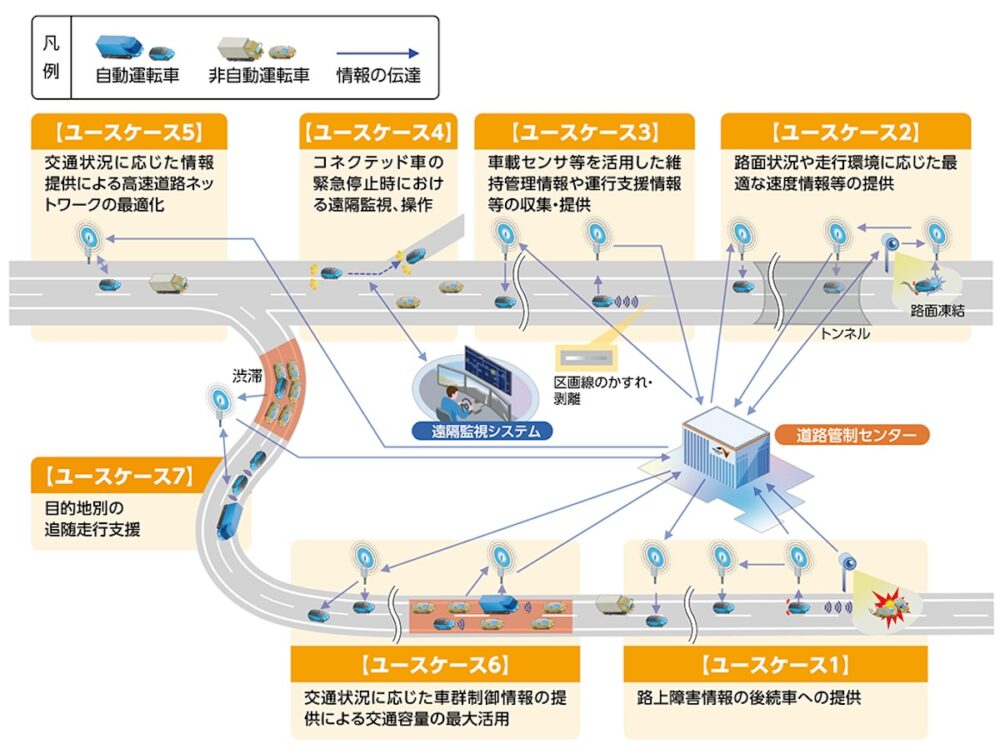
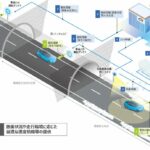
今回、T2とKDDIが建設中の新東名新秦野IC~新御殿場IC間で行なった実証実験は、この「ユースケース4」の「コネクテッド車の緊急停止時における遠隔監視、操作」に該当するもので、地震等の緊急事態を想定し、遠隔監視システムから緊急停止指示及び安全を遠隔から確認した上での再発車指示を送信、自動運転トラックを停止・再発車させることに成功した。
また、交通事故等で自動運転の再開が難しい場合も想定し、現場に駆け付けた現場業務措置実施者と遠隔監視者との通話機能の検証も行なった。
日本では2023年4月1日より改正道路交通法が施行され、レベル4自動運転を行なうための特定自動運行制度が創設。
特定自動運行(=レベル4自動運転)での公道走行時には、遠隔監視を行なう特定自動運行主任者や、交通事故等が起こった際に現場に駆け付ける現場業務措置実施者を配置することが定められた(※遠隔監視の代わりに車内に特定自動運行主任者を配置することも可能)。
T2が目指すレベル4自動運転トラックによる幹線輸送サービス事業の確立のためには、遠隔監視システムが必須といえ、今回の実証実験の成功は自動運転時代への大きな一歩となりそうだ。
【画像ギャラリー】「高速道路の自動運転時代に向けた路車協調実証実験」のユースケース(14枚)画像ギャラリー